Рассмотрим плавание судна в полупогруженном состоянии на спокойной воде. Считается, что оно не совершает никаких движений или совершает их настолько медленно, что можно пренебречь силами инерционной природы (инерцией окружающей воды и масс судна). В этом случае судно будет находиться под действием сил тяжести всех частей судна и грузов, сил гидростатического давления на смоченную (погруженную) поверхность судна и сил аэростатического давления на поверхность судна и грузов, контактирующих с воздухом.
Все эти распределенные силы можно заменить их равнодействующими, приложенными в соответствующих точках. Судно будет находиться в равновесии, если сумма всех равнодействующих сил и сумма их моментов будет равна нулю.
Силы тяжести всех частей судна и грузов приводятся к одной равнодействующей – силе тяжести судна D с (рис. 2.5), направленной вертикально вниз. Точка ее приложения G называется центром тяжести (центром масс) судна; его положение в системе координат теоретического чертежа (системе связанной с судном) определяется координатами xg, yg, zg. Сила тяжести связана с массой судна D, зависимостью  , где g – ускорение свободного падения.
, где g – ускорение свободного падения.
Со стороны воды на каждую элементарную площадку поверхности корпуса будет действовать по нормали (перпендикулярно к ее поверхности) гидростатическое давление
 ,
,
| где
| r
| –
| плотность воды;
|
|
| z
| –
| аппликата (глубина погружения) элементарной площадки;
|
|
| р 0
| –
| атмосферное (аэростатическое) давление.
|
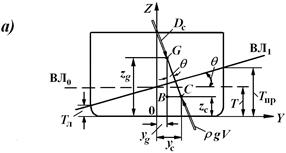
Рис. 2.5. Равновесие судна, плавающего с креном (а) и дифферентом (б)
Атмосферное давление действует как на надводную часть судна, так и на подводную (через объем воды). Учитывая незначительный перепад этого давления по высоте судна, влиянием аэростатического давления на посадку судна пренебрегают.
Поскольку горизонтальные составляющие статического давления воды на судно уравновешивают друг друга, равнодействующая направлена вертикально вверх и по величине равна силе тяжести воды в объеме погруженной части судна, т.е.  .
.
Сила называется силой плавучести, объем погруженной части судна V – объемным водоизмещением, а величина  – массовым водоизмещением судна. Вектор силы плавучести проходит через центр тяжести погруженного объема с координатами х с, у с, z с; в теории корабля этот центр принято называть центром величины.
– массовым водоизмещением судна. Вектор силы плавучести проходит через центр тяжести погруженного объема с координатами х с, у с, z с; в теории корабля этот центр принято называть центром величины.
Судно находится в равновесии, если сила плавучести равна силе тяжести судна (D с), а центр величины (с) находится на одной вертикали с центром тяжести (G) (см. рис. 2.5).
Первое условие равновесия запишем в виде  ; это уравнение называется уравнением плавучести.
; это уравнение называется уравнением плавучести.
Второе условие определяет положение плоскости действующей ватерлинии и включает две составляющие (два уравнения). Для их получения рассмотрим произвольную посадку судна, т.е. посадку с креном и деферентом. Из рассмотрения прямоугольных треугольников BGCB и AGCA можно получить:  и
и  .
.
Последние уравнения и уравнение плавучести образуют систему уравнений равновесия судна для общего случая его посадки
 . .
| (2.1)
|
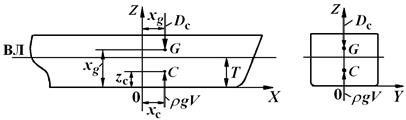
При прямой посадке судна (q = y = 0, рис. 2.6) система уравнений равновесия судна принимает вид

Рис. 2.6. Равновесие судна, плавающего без крена и дифферента
Уравнения системы (2.1) содержат двоякого рода показатели:
· D c, xg, уg, zg – определяют вес и положение центра тяжести судна;
· V, x c, y c, z c – зависят от формы корпуса, задаваемой теоретическим чертежом, и от посадки судна.