Суммарная мощность на валу электрических машин: 
 Полная механическая мощность PMx:
Полная механическая мощность PMx: 
Мощность скольжения 
Суммарная механическая мощность (без учета механических потерь) на валу электрических машин составит:  Для цепи постоянного тока электромеханического каскада можно составить эквивалентную схему, показанную на рис.8.48.
Для цепи постоянного тока электромеханического каскада можно составить эквивалентную схему, показанную на рис.8.48.


 где
где 


 тогда можно записать выражение для выпрямленного тока
тогда можно записать выражение для выпрямленного тока


В каскаде идеальным ХХ называется режим, когда выпрямленный ток равен нулю(Id=0).
Id=0: 
 где w0 – синхронная угловая скорость АД.
где w0 – синхронная угловая скорость АД.

с помощью тока возбуждения Iв можно устанавливать необходимый магнитный поток Ф, а значит s0, и получать желаемую скорость w0к идеального холостого хода каскада. Так осуществляется регулирование скорости АД в электромеханическом каскаде.
Электромагнитную мощность Рэм, которая передается роторной цепи от статора АД, можно выразить через параметры выпрямленного тока: 
Выпрямленный ток ротора

где  ,
,  ,
,  ,
, 
Для дальнейших преобразований обозначили  , тогда
, тогда 
и электромагнитная мощность (8.303) с учетом (8.310) получает вид
 (8.311) Обозначим
(8.311) Обозначим 


Максимальное значение Рm электромагнитная мощность принимает при абсолютном скольжении 

Разделив (8.314) на угловую скорость (8.301) идеального холостого хода каскада, получим выражение электромагнитного момента
 (8.317) где
(8.317) где  (8.318)
(8.318)
Подобно частотному управлению АД обозначим относительную скорость идеального холостого хода каскада  (8.319)
(8.319)



параметрическое уравнение семейства механических характеристик электромеханического каскада. Жесткость этих характеристик 
При sa<<skn-a механические характеристики каскада можно линеаризовать:


bл – модуль жесткости линеаризованных механических характеристик.
Нижняя граница регулирования скорости в электромеханическом каскаде ограничивается допустимыми габаритами машины постоянного тока. Мощность МПТ: 
 (8.328)
(8.328)
Регулирование скорости в каскаде экономичное, поскольку потери мощности в роторной цепи  пропорциональны абсолютному скольжениюВ номинальном режиме к.п.д. каскада составляет (82¸86)%, а коэффициент мощности АД равен 0,75¸0,85.
пропорциональны абсолютному скольжениюВ номинальном режиме к.п.д. каскада составляет (82¸86)%, а коэффициент мощности АД равен 0,75¸0,85.
44. АСИНХРОННО-ВЕНТИЛЬНЫЙ (ЭЛЕКТРИЧЕСКИЙ) КАСКАД, ЕГО СВОЙСТВА И 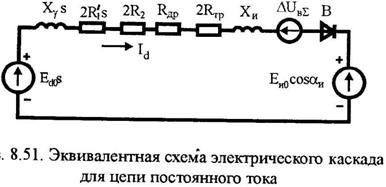 ХАРАКТЕРИСТИКИ.
ХАРАКТЕРИСТИКИ.


Выпрямленный ток ротора:

 (8.334)
(8.334)
 aи – угол откр вентилей ВИ в инверторном режиме.
aи – угол откр вентилей ВИ в инверторном режиме.
Скольжение s0, соответствующее идеальному холостому ходу: 
Скорости идеального холостого хода w0к:
Электромагнитного момент: 
Параметрическое уравнение семейства механических характеристик АД в АВК

механические характеристики ад при разных a не будут конгруэнтными
Характеристики могут быть линеаризованы при sa<<skn-a с получением уравнения
Регулировочные свойства АВК ограничены пределами изменения угла инвертирования aи min£aи£90. Диапазон регулирования обычно D=(1,5¸10):1. Коэффициент мощности низкий (cosj»0,25¸0,45). К.п.д. при максимальной скорости находится в пределах (80¸90)%. Мощность АВК составляет от сотен кВт до десятков МВт.
1. Мех и электромех хар-ки асинхронного короткозамкнутого двигателя при переменных параметрах.
2. Механическая модель, характеристики и свойства синхронного двигателя.
3. Динамические свойства синхронного двигателя при линеаризации угловой характеристики.
4. Взаимосвязанный электропривод при механическом соединении валов.
5. Взаимосвязанный электропривод с электрическим валом
6. Переходные процессы в электроприводе: общие сведенья.
7. Элмехе пер-ные процессы ЭП с лин. мех характеристикой и Мс=const при ступенчатом воздействии.
8. Электромеханический переходный процесс электропривода при набросе и сбросе нагрузки.
9. Механические переходные процессы электропривода с линейной механичесой характеристикой при линейном управляющем воздействии и Мс=const.
10. Переходные процессы в цепях возбуждения электрических машин.
11. Переходные процессы электропривода с учётом нелинейности механической характеристики.
12. Элмех переходные процессы электропривода с асинхронным короткозамкнутым двигателем.
13. Потери мощности в установившихся режимах работы нерегулируемых и регулируемых ЭП.
14. К.П.Д. и коэффициент мощности нерегулируемого электропривода.
15. К.П.Д. и коэффициент мощности регулируемого электропривода.
16. Потери энергии в переходных процессах электропривода при ω0=const и Мс=0.
17. Потери энергии в переходных процессах электропривода при ω0=const и Мс=const.
18. Потери энергии в переходных процессах электропривода при линейном изменении скорости идеального холостого хода.
19. Выбор электродвигателей: общие сведенья.
20. Нагрев и охлаждение электродвигателей.
21. Номинальные режимы работы электродвигателей.
22. Нагрузочные и скоростные диаграммы механизма и электропривода.
23. Выбор мощности электродвигателей для режима S1.
24. Выбор мощности электродвигателей для длительного режима с переменной нагрузкой (S6-S8).
25. Выбор мощности электродвигателей для кратковременного режима работы S2.
26. Выбор мощности электродвигателей для повторно-кратковременного режима работы (S3-S5).
27. Допустимое число включений в час асинхронных короткозамкнутых двигателей.
28. Выбор электродвигателя при ударной нагрузке электропривода.
29. Регулирование координат электропривода.
30. Способы регулирования скорости электродвигателей.
31. Регулирование скорости АД в системе РН-АД.
30. Ступенчатое реостатное регулирование скорости АД.
31. Регулирование скорости АД в системе ИРС-АД.
32. Закон М.П. Костенко скалярного частотного управления АД и свойства АД при частотном управлении по этому закону.
33. Влияние R1 частотно-управляемых АД.
34. Замкнутые системы скалярного частотного управления АД.
35. Скалярное частотное управление по закону ψ1=const.
36. Скалярное частотное управление по закону ψм=const.
37. Скалярное частотное управление по закону ψ2=const.
38. Скалярное частотное управление АД при стабилизации абсолютного скольжения.
39. Скалярное частотно-токовое управление АД.
40. Рекуперативное и резистивное торможение частотно-регулируемых электроприводов.
41. Расчёт резисторов для резистивного торможения АД.
42. Регулирование Скорости АД в каскадных схемах.
43. Машинно-вентильный каскад, его свойства и характеристики.
44. Асинхронно-вентильный каскад, его свойства и характеристики.





