Микропроцессор 1882ВЕ53У, обладающий встроеннымиОЗУ и ПЗУ, имеет 4 порта ввода/вывода. В данной СУ используются порт P0 как совмещенная шина адреса/данных, порт P2, использующийся как шина данных для обмена информацией с объектом управления. Шина управления формирует необходимые сигналы для согласования работы всех компонентов МП системы. Для разделения ШД/ША используются схема из 2х буферных регистров и адресный регистр. Для приема/выдачи данных микропроцессором используется параллельный порт ввода/вывода КР580ВВ55. Данные на объект управления передаются через буферный регистр. Для гальванической развязки как сигналов управления так и сигналов с датчиков между силовой и управляющей частьюиспользуются оптронные пары. Сигналы управления поступают на блок управления приводами. Данные с аналоговых датчиков поступают на входы АЦП, откуда после преобразования в цифровом виде передаются микропроцессору через параллельный порт ввода/вывода КР580ВВ55.
Принципиальная схема МП СУ транспортным модулем участка
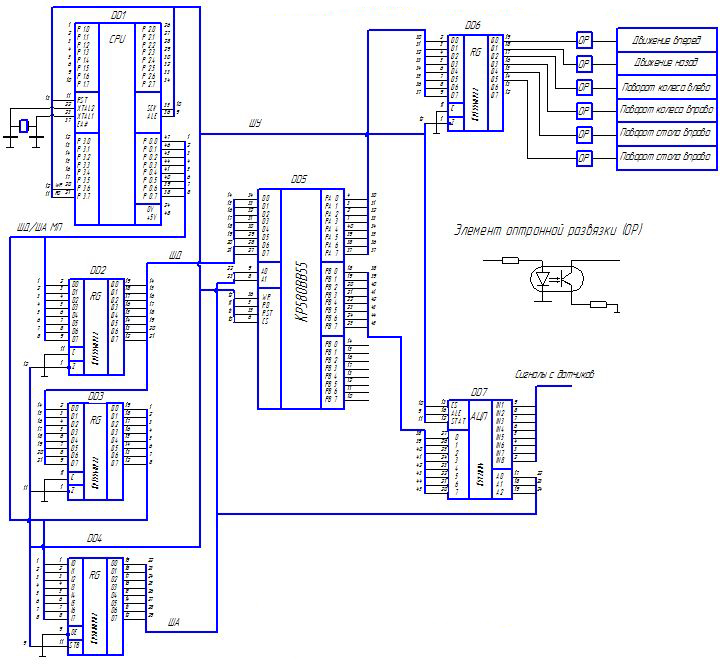 DD 1 – микропроцессор 1882ВЕ53У
DD 1 – микропроцессор 1882ВЕ53У
DD 2, DD 3, DD 6 – 8-разрядный адресный регистр КР580ИР82
DD 4 – регистр данных КР1554ИР22
DD 5 – параллельный порт ввода/вывода КР580ВВ55
DD 7 – аналогово-цифровой преобразователь со встроенным компоратором К572ПВ4
ОР – оптронная пара
Описание принципиальной схемы
Для того чтобы организовать работу возникает необходимость считывания информации с определённых датчиков, в зависимости от управляющей программы, хранящейся в ПЗУ. Микропроцессор формирует адрес, указывающий, какой из датчиков будет опрашиваться, а также подает адрес на КР580ВВ55, для того чтобы задействовать нужный порт платы ввода/вывода. Также он формирует сигналы управления. МП1882 имеет совмещенную шину адреса и данных. Для разделения сигналов совмещенной шины адрес/данные их необходимо "демультиплексировать" с помощью адресного RG КР580ИР82 и двунаправленного буфера BD, организованного с помощью двух однонаправленных буферных регистров КР1554ИР22. При обращении к памяти (в том числе при выборке команды) микропроцессор передает по ШАД адрес ячейки памяти. Этот адрес записывается в D-триггеры регистра RG сигналом ALE генерируемым микрпроцессором в этот момент и поступающим на синхровходы D-триггеров. Адрес в регистре сохраняется на время последующей передачи данных. Следом по ШАД передаются, либо данные от микропроцессора к ВУ или ЗУ, либо в обратном направлении. МП должен, во-первых, обеспечить правильное направление передачи буфера BD и, во-вторых, открыть (разрешить) тристабильные элементы буфера для передачи данных. Первую задачу решает сигнал МП WR/RD (WR=1 передача данных от МП, RD=1 прием данных МП).
Далее сигнал адреса с микропроцессора поступает на АЦП и на УВВ КР580ВВ55, задействуя порт B. АЦП с помощью встроенного мультиплексора задействует нужный датчик. Микропроцессор по шине управления перёдаёт сигналы на микросхемы, входящие в состав микропроцессорного устройства. По этим сигналам происходит логика выбора той микросхемы, которая будет задействована, а также характер работы: например, чтение или запись.
Когда по алгоритму работы нам необходимо включить какой-либо из приводов микропроцессор формирует сигналы. Сигналы адреса поступают на УВВ КР580ВВ55, тем самым задействуя порт A для передачи данных, а по ШД в буферный регистр передаются сигналы управления, Которые с помощью оптронных развязок поступают на приводы робокары.
Алгоритм работы










