

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Индивидуальные очистные сооружения: К классу индивидуальных очистных сооружений относят сооружения, пропускная способность которых...
Топ:
Характеристика АТП и сварочно-жестяницкого участка: Транспорт в настоящее время является одной из важнейших отраслей народного...
Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов...
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Подходы к решению темы фильма: Существует три основных типа исторического фильма, имеющих между собой много общего...
Инженерная защита территорий, зданий и сооружений от опасных геологических процессов: Изучение оползневых явлений, оценка устойчивости склонов и проектирование противооползневых сооружений — актуальнейшие задачи, стоящие перед отечественными...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
Ранее показано, что движение плоской фигуры в ее плоскости можно рассматривать как совокупность двух движений: поступательного движения фигуры вместе с полюсом и ее вращения вокруг полюса.
Ускорения точек плоской фигуры определяются следующей теоремой: ускорение любой точки плоской фигуры равно геометрической сумме ускорения полюса и ускорения этой точки в ее вращении вместе с плоской фигурой вокруг полюса.
Для установления этой зависимости допустим, что известны ускорение  некоторой точки О плоской фигуры и алгебраические величины угловой скорости и углового ускорения плоской фигуры
некоторой точки О плоской фигуры и алгебраические величины угловой скорости и углового ускорения плоской фигуры  и
и  , т. е. кроме модулей
, т. е. кроме модулей  и
и  известны направление вращения плоской фигуры в данный момент времени и характер ее вращения (ускоренное вращение или замедленное).
известны направление вращения плоской фигуры в данный момент времени и характер ее вращения (ускоренное вращение или замедленное).
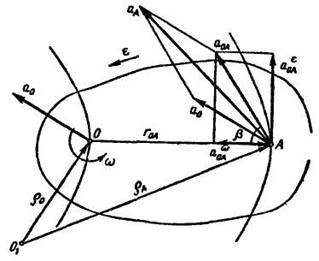
Рис. 11.9
Положим, что в данный момент времени фигура вращается ускоренно в сторону, противоположную вращению часовой стрелки (рис. 11.9). Так как вращение фигуры ускоренное, то направим в сторону . Определим ускорение любой точки А фигуры, приняв точку О за полюс.
Воспользуемся теоремой о скоростях точек плоской фигуры; на основании (5) имеем

Ускорение точки А найдем как векторную производную по времени от скорости этой точки:
 .
.
Так как

имеем

Здесь:  - вращательное ускорение точки А во вращении вокруг полюса О;
- вращательное ускорение точки А во вращении вокруг полюса О;  - центростремительное ускорение точки А во вращении вокруг полюса О.
- центростремительное ускорение точки А во вращении вокруг полюса О.
Поэтому
 (11.6)
(11.6)
Но геометрическая сумма вращательного и центростремительного ускорений  и
и  является полным ускорением точки А в ее вращении вместе с плоской фигурой вокруг полюса О:
является полным ускорением точки А в ее вращении вместе с плоской фигурой вокруг полюса О:
Окончательно получаем
По формулам, приведенным ранее, находим модули:
|
|
а также угол β:
При ускоренном вращении вращательное ускорение направлено по отношению к полюсу в сторону вращения плоской фигуры, а при замедленном вращении - противоположно, т. е. направление по отношению к полюсу всегда соответствует направлению углового ускорения  .
.
Ускорение точки А плоской фигуры определяется путем построения многоугольника ускорений. На рис. 11.9 построен прямоугольник,определяющий ускорение точки А в ее вращательном движении вместе с плоской фигурой вокруг полюса О:
 ,
,
а затем находятся ускорение точки  как диагональ параллелограмма ускорений, сторонами которого служат ускорение полюса
как диагональ параллелограмма ускорений, сторонами которого служат ускорение полюса  и ускорение точки во вращательном движении фигуры вокруг полюса
и ускорение точки во вращательном движении фигуры вокруг полюса  .
.
Следствие 1. Проекция ускорения любой точки плоской фигуры на ось, проведенную uз произвольного полюса через эту точку, не может быть больше проекции ускорения полюса на ту же ось.
Если известно ускорение полюса О, ускорение точки А плоской фигуры определяется по формуле (11.6):
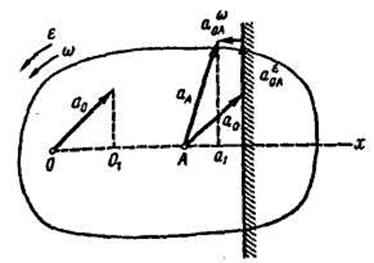
Рис. 11.10

Сложим  правилу многоугольника, тогда будет замыкающей стороной многоугольника ускорений (рис. 11.10).
правилу многоугольника, тогда будет замыкающей стороной многоугольника ускорений (рис. 11.10).
Проведем из полюса О через точку А ось х и спроецируем все эти векторы на эту ось:

Проекция центростремительного ускорения на ось х всегда отрицательна, так как это ускорение направлено от точки А к полюсу О, т. е. Противоположно направлению оси х:
Проекция вращательного ускорения на ось х равна нулю, так как это ускорение всегда перпендикулярно оси х:
 .
.
На этом основании

В этом заключается первое следствие теоремы об ускорениях точек плоской фигуры.
Проекции ускорений на ось, направленную из полюса, могут иметь знаки плюс и минус.
Из следствия вытекает, что алгебраическая величина проекции  меньше
меньше  , а абсолютное значение
, а абсолютное значение  может и превышать
может и превышать  при большом центростремительном ускорении . Проекции ускорений точки А и полюса О на ось х равны в том случае, если
при большом центростремительном ускорении . Проекции ускорений точки А и полюса О на ось х равны в том случае, если  т. е. при
т. е. при 
|
|
Проведем через конец ускорения полюса  , отложенного в точке А, прямую, перпендикулярную оси х. Эта прямая представляет собой годограф возможных ускорений точки плоской фигуры при
, отложенного в точке А, прямую, перпендикулярную оси х. Эта прямая представляет собой годограф возможных ускорений точки плоской фигуры при  т. е. при , и является границей, за которую не могут выходить концы возможных ускорений точки А. Действительно, если то конец ускорения обязательно находится на этой прямой, а если
т. е. при , и является границей, за которую не могут выходить концы возможных ускорений точки А. Действительно, если то конец ускорения обязательно находится на этой прямой, а если  , то конец ускорения
, то конец ускорения  находится с той стороны этой прямой, где расположен полюс.
находится с той стороны этой прямой, где расположен полюс.
Следствие 2. Концы ускорений точек неизменяемого отрезка лежат на одной прямой и делят эту прямую на части, пропорциональные расстояниям между этими точками.
Зная ускорение точки А отрезка АВ, алгебраические величины угловой скорости  и углового ускорения
и углового ускорения  , определим ускорение точки В отрезка, приняв точку А за полюс:
, определим ускорение точки В отрезка, приняв точку А за полюс:
 .
.
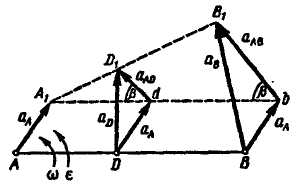
Рис. 11.11
Построим в точке В ускорение полюса (рис. 11.11). Положим, что отрезок вращается ускоренно в направлении, обратном направлению вращения часовой стрелки. Из конца ускорения отложим ускорение  под углом
под углом  к отрезку A 1 b, равному и параллельному отрезку АВ. Соединив точку В с концом , получаем ускорение точки В.
к отрезку A 1 b, равному и параллельному отрезку АВ. Соединив точку В с концом , получаем ускорение точки В.
Для определения ускорения какой-либо другой точки отрезка, например точки D, выполним аналогичное построение.
Очевидно, что ускорение  составляет с отрезком А 1 b тот же угол β.
составляет с отрезком А 1 b тот же угол β.
Ускорения точек В и D отрезка в его вращательном движении вокруг полюса А пропорциональны расстояниям от этих точек до полюса. Действительно,

Поэтому dD 1/ bB 1 = AD/AB, но AD = A 1 d и АВ = А 1 b, как противоположные стороны параллелограммов. Тогда
 .
.
Таким образом,  . Из подобия треугольников следует, что:
. Из подобия треугольников следует, что:
Концы ускорений - точки a 1, d 1 и В 1 - лежат на oдной прямой;

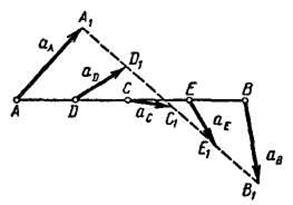
Рис. 11.12
Последнее соотношение показывает, что концы ускорений точек неизменяемого отрезка делят прямую, соединяющую эти концы, на части, пропорциональные расстояниям между соответствующими точками.
Поэтому, зная ускорения и  концов отрезка АВ, можно определить графически ускорения любой точки этого отрезка.
концов отрезка АВ, можно определить графически ускорения любой точки этого отрезка.
Допустим, что требуется определить ускорение точек D, С и Е, делящих отрезок на четыре равные части (рис. 11.12). Соединяем концы ускорений точек А и В, отложенных в масштабе, отрезком прямой А 1 В 1 и делим этот отрезок точками D 1, C 1 и E 1 на четыре равные части. Соединяя точки D и D 1, С и C 1, E и E 1, получаем ускорения этих точек  ,
,  и
и  . Пользуясь масштабом, находим их модули и по чертежу определяем их направления.
. Пользуясь масштабом, находим их модули и по чертежу определяем их направления.
|
|
Лекция 12
|
|
|

Состав сооружений: решетки и песколовки: Решетки – это первое устройство в схеме очистных сооружений. Они представляют...

Организация стока поверхностных вод: Наибольшее количество влаги на земном шаре испаряется с поверхности морей и океанов (88‰)...

Типы оградительных сооружений в морском порту: По расположению оградительных сооружений в плане различают волноломы, обе оконечности...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!