1. В качестве передаточной функций датчика выберем апериодическое звено первого порядка:
 (3.8)
(3.8)
где T – постоянная времени датчика.
Для измерения уровня сырья в емкости используется радарный уровнемер c постоянной времени T1=15с.
 (3.9)
(3.9)
2. При автоматизации производственных процессов чаще всего задача синтеза сводится к выбору наиболее подходящего типового регулятора П, ПИ, ПИД законами регулирования и определению его параметров настройки, обеспечивающих требуемый переходный процесс.
Выбор регулятора и определение его параметров настройки для объекта с известными характеристиками ведут в следующем порядке:
– исходя из особенностей технологического процесса, формируют требования к качеству регулирования, т.е. задаются некоторыми типовыми переходными процессами и его показателями;
– выбирают типовой закон регулирования;
– определяют параметры настройки регулятора;
– при вычисленных значениях настроечных параметров регулятора моделируют переходной процесс с целью анализа основных качественных характеристик системы.
Для обеспечения устойчивости контура регулирования уровня жидкости достаточно установить небольшой диапазон пропорциональности регулятора. Однако при наличии даже небольших случайных возмущений плунжер регулирующего клапана может достигнуть предельного положения, что недопустимо. Иногда по уровню жидкости в резервуаре регулируют расход ее в другой части объекта, как в нашем случае. Однако если расход колеблется значительно, то регулирование неосуществимо. В таких случаях используют ПИ – регуляторы, устанавливая широкий диапазон пропорциональности. При этом интегральная составляющая регулятора обеспечивает постепенное выведение регулируемого параметра па заданное значение.
Согласно теории автоматического управления для замкнутой системы, которая имеет показатель колебательности М, можно в комплексной плоскости построить АФЧХ разомкнутой системы, которая будет касаться окружности с центром на отрицательной действительной оси в точке:

и радиусом:

Исходя из этих условий, используется следующий алгоритм расчёта параметров регулятора на желаемую величину М:
1. Из начала координат комплексной плоскости проводится луч под углом φ=arcsin1/M относительно отрицательной вещественной полуоси;
2. Строится АФЧХ объекта регулирования с условным регулятором, с коэффициентом передачи равным 1;
3. Далее строится окружность с центром на действительной оси, которая касается луча и АФЧХ.
Передаточная функция ПИ – регулятора:

Подбор параметров регулятора производим в пакете Matlab. По методике, изложенной выше, получаем следующее (рис. 3.1):
clc
clear
% величина показателя качества
M=1.2;
K1=2.68;
K2=0.021;
w=-1:0.0001:1;
p=j*w;
W1=(1.81)./(1010.*p+1);
W2=(1)./(15.*p +1);
WW=(W1)./(1+W1.*W2);
WWW=WW.*(K1+K2./p);
% функции для перехода в комплексную область
Re=real(WWW);
Im=imag(WWW);
%Ro=M/(1-M^2);
R=abs(Ro);
C=M^2/(1-M^2);
x=-R^2:0.001:R^2;
y1=sqrt((R^2-(x-C).^2));
y2=-sqrt((R^2-(x-C).^2));
k=tan(asin(1/M));
y3=k*x;
figure(1)
plot(Re,Im,x,y1,x,y2,x,y3)
grid
axis([-4 4 -4 4])
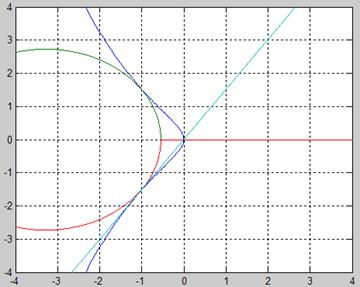
Рисунок 3.2 – Нахождение параметров ПИ-регулятора
Получим передаточную регулятора:
 (3.13)
(3.13)
Промоделируем полученную систему с регулятором:

Рисунок 3.3 - Модель системы регулирования уровня в емкости
Получим переходный процесс в системе:

Рисунок 3.4 – Динамика контура регулирования «уровень в емкости - расход питательной воды на входе в котел»
Из рисунка 3.4 найдем: перерегулирование  =19,2 %; статическая ошибка ε стремится к нулю. Как видно из рисунка 3.3 регулятор достаточно хорошо отрабатывает заданное значение.
=19,2 %; статическая ошибка ε стремится к нулю. Как видно из рисунка 3.3 регулятор достаточно хорошо отрабатывает заданное значение.






