

Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...

Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Индивидуальные и групповые автопоилки: для животных. Схемы и конструкции...
Типы сооружений для обработки осадков: Септиками называются сооружения, в которых одновременно происходят осветление сточной жидкости...
Топ:
Определение места расположения распределительного центра: Фирма реализует продукцию на рынках сбыта и имеет постоянных поставщиков в разных регионах. Увеличение объема продаж...
Оснащения врачебно-сестринской бригады.
Генеалогическое древо Султанов Османской империи: Османские правители, вначале, будучи еще бейлербеями Анатолии, женились на дочерях византийских императоров...
Интересное:
Лечение прогрессирующих форм рака: Одним из наиболее важных достижений экспериментальной химиотерапии опухолей, начатой в 60-х и реализованной в 70-х годах, является...
Берегоукрепление оползневых склонов: На прибрежных склонах основной причиной развития оползневых процессов является подмыв водами рек естественных склонов...
Влияние предпринимательской среды на эффективное функционирование предприятия: Предпринимательская среда – это совокупность внешних и внутренних факторов, оказывающих влияние на функционирование фирмы...
Дисциплины:
|
из
5.00
|
Заказать работу |
|
|
|
|
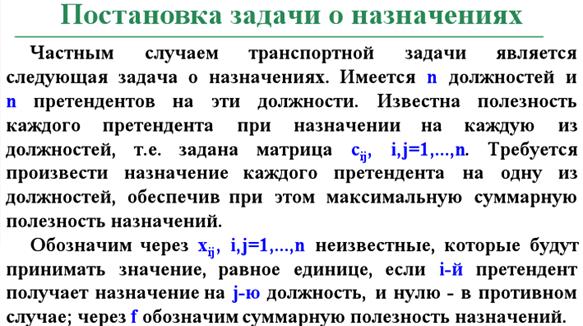
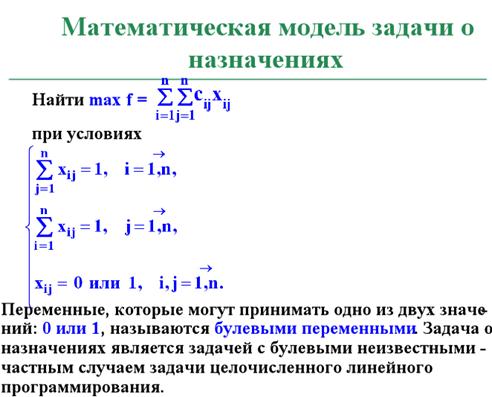
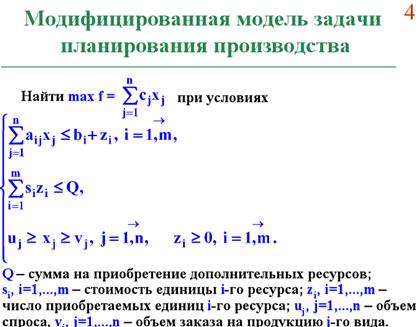
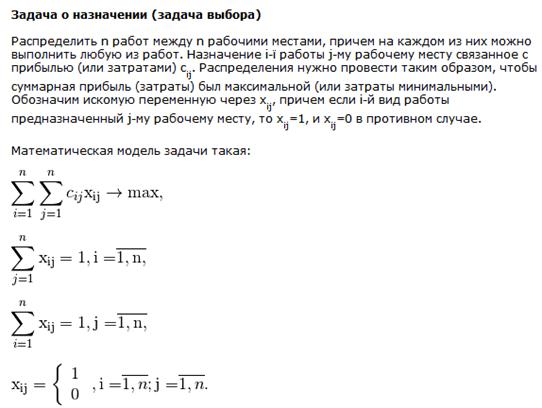
9. Задача производственного планирования как задача об оптимальных назначениях
Базовая модель задачи планирования производства.

| 
|
Математические модели дискретного программирования



Классификация прикладных задач целочисленного программирования
См. вопрос №10
Геометрическая интерпретация задач целочисленного программирования.
См. вопрос №3
Характеристики численных методов решения дискретных задач.
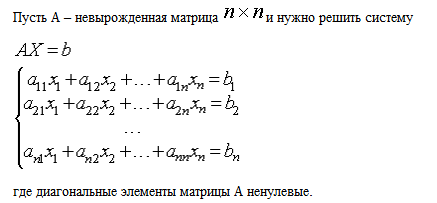
Методы решения системы делятся на две группы:
1) прямые (точные методы);
2) итерационные методы (приближенные).
В точных методах решение х находится за конечное число действий, но из-за погрешности округления и их накопления прямые методы можно назвать точными, только отвлекаясь от погрешностей округления.
К точным методам относятся следующие:
К итерационным методам относятся:
· Метод Якоби (простых итераций)
· Метод Зейделя
· Метод Ричардсона
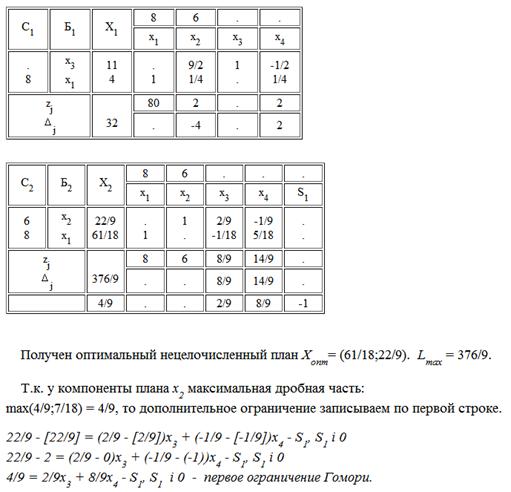
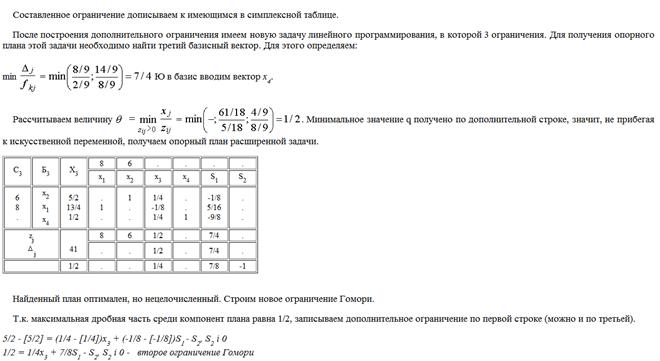
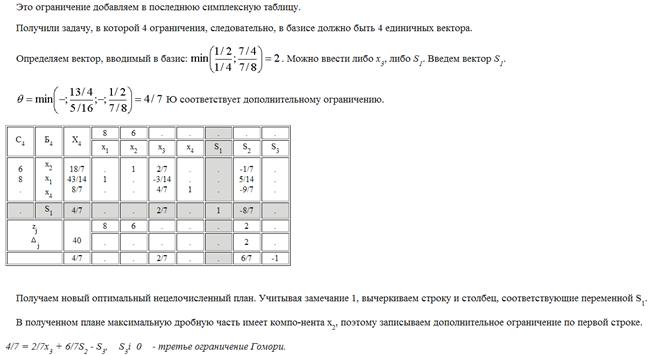
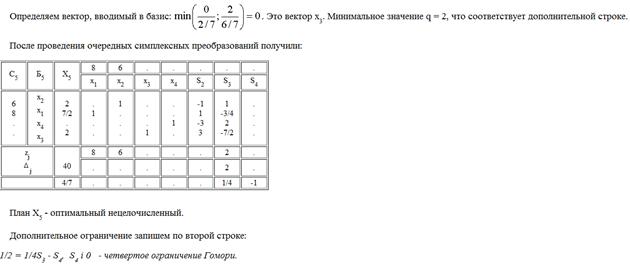
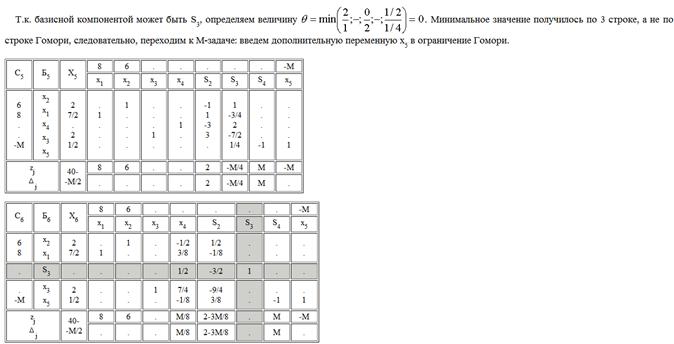
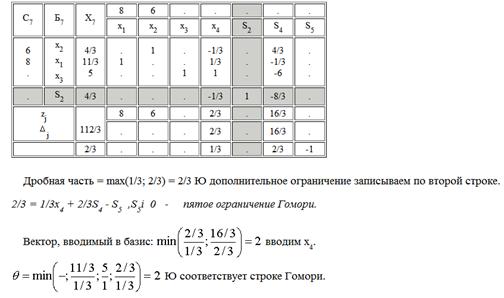
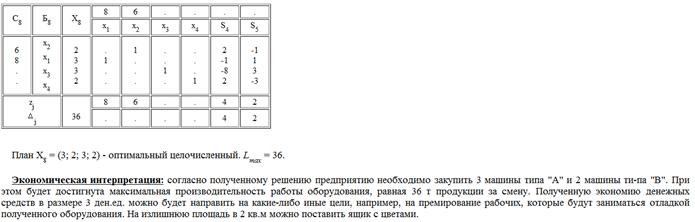
14. Проектирование оптимального производственного плана машиностроительного предприятия методом Гомори 
Градиентный метод
Градиентом непрерывной однозначной функции j (обозначается gradj или Ñj) называется вектор
 ,
,
где  – частная производная функции по m-му параметру xm,
– частная производная функции по m-му параметру xm,  – единичные векторы в направлении координатных осей.
– единичные векторы в направлении координатных осей.
Градиент функции Ñjпредставляет собой вектор перпендикулярный к
контуру поверхности j в пространстве параметров, который указывает направление наибольшего возрастания j в данной точке. Противоположный вектор задает направление наискорейшего спуска (рис. 2.3.1). Изменяя в функции отклика независимые переменные пропорционально величинам коэффициента регрессии, будем двигаться в направлении градиента функции отклика по самому крутому пути. Поэтому процедура движения называется "крутым восхождением". Величины составляющих градиента определяются формой поверхности отклика, начальной (нулевой) точкой  и интервалами варьирования.
и интервалами варьирования.
|
|
Длина вектора Ñj определяется по формуле:
 (2.3.1)
(2.3.1)
Движение по градиенту осуществляется в следующем порядке:
1. Вычисляются составляющие вектора  в точке (основной уровень):
в точке (основной уровень):  .
.
2. Последовательно прибавляют составляющие  к основному уровню факторов:
к основному уровню факторов:  , где hj– шаг движения.
, где hj– шаг движения.
3. Итерационный процесс заканчивается, когда выполняется неравенство:  <e
<e
Шаг движения по градиенту выбирается из следующих соображений. Небольшой шаг потребует значительного числа опытов при движении к оптимуму. Большой шаг увеличивает вероятность проскакивания области оптимума. Нижняя граница шага ограничена возможностью фиксирования двух соседних опытов, а верхняя – областью определения фактора.
Функция, величины коэффициентов которой различаются несущественно, называется симметричной относительно коэффициентов. Движение по градиенту наиболее эффективно для симметричной функции. Движение по градиенту считается эффективным, если реализация опытов приводит к улучшению значения целевой функции.
Градиентный метод оптимизации не решает вопроса о самой лучшей точке поверхности отклика при наличии нескольких экстремальных точек.

Рис. 2.3.1. Градиент функции Ñj в точке А.
|
|
|

История развития пистолетов-пулеметов: Предпосылкой для возникновения пистолетов-пулеметов послужила давняя тенденция тяготения винтовок...

Кормораздатчик мобильный электрифицированный: схема и процесс работы устройства...

Своеобразие русской архитектуры: Основной материал – дерево – быстрота постройки, но недолговечность и необходимость деления...

История создания датчика движения: Первый прибор для обнаружения движения был изобретен немецким физиком Генрихом Герцем...
© cyberpedia.su 2017-2024 - Не является автором материалов. Исключительное право сохранено за автором текста.
Если вы не хотите, чтобы данный материал был у нас на сайте, перейдите по ссылке: Нарушение авторских прав. Мы поможем в написании вашей работы!