Магниторезистивные датчики – это бистабильные устройства, которые обладают двумя противоположными рабочими характеристиками. Это объясняется тем, что при изменении направления внешнего магнитного поля, при определенных условиях пленка пермаллоя может намагнититься в противоположном направлении. Поэтому для стабилизации характеристик датчика требуется внешнее магнитное поле.
Соответствующим образом расположенный магнит может выполнять как стабилизацию, так и обратное смещение. Такой магнит приклеивается к обратной стороне датчика так, что датчик пронизывается однородным магнитным полем. При этом компонента поля вдоль чувствительного направления отсутствует и на выходе датчика сигнал равен нулю.
При приближении ферромагнитного вращающегося объекта к датчику, магнитное поле постоянного магнита изменяется в зависимости от положения объекта, как показано на рис. 5.
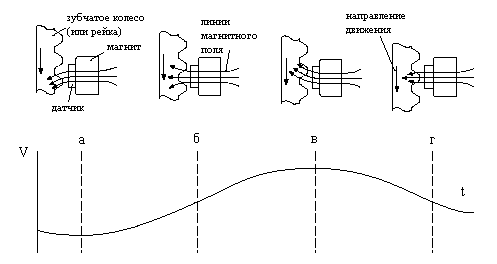
Рис.5. Изменение магнитного поля постоянного магнита
б,г – “симметричное” положение; а, в - “несимметричное” положение.
В “симметричном” положении, когда зуб или впадина вращающегося объекта находятся точно напротив датчика, объект не оказывает влияния на магнитное поле датчика. При этом на выходе датчика сигнал равен нулю.
В “несимметричном” положении влияние объекта и амплитуда сигнала на выходе датчика зависят от конкретного расположения объекта относительно датчика.
Максимальное напряжение на выходе датчика зависит:
1) от величины напряженности магнитного поля,
2) от расстояния между датчиком и вращающимся объектом,
3) от структуры вращающегося объекта.
Описанный выше принцип работы относится к датчикам с так называемыми “пассивными” вращающимися объектами, которые сами не намагничены.
В случае “активных” вращающихся объектов сам объект обеспечивает “рабочее” магнитное поле, и постоянный магнит не используется.
Достоинство методов: высокая точность измерений, поскольку частота выходного сигнала прямо пропорциональна скорости вращения.
Формирование выходного сигнала датчика:
1) фильтрация, обеспечивающая электромагнитную совместимость (ЭМС),
2) усиление,
3) термокомпенсация,
4) гистерезис переключения.
Выходной сигнал датчика проходит через ЭМС фильтр, усиливается и дискретизируется посредством компаратора, имеющего встроенный гистерезис переключения, выполненный на триггере Шмитта. Стабилизатор напряжения обеспечивает датчик, усилитель и компаратор напряжением 5 В. (см. рис.6).
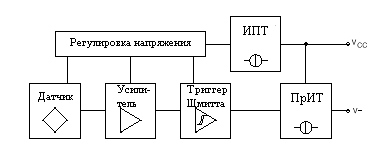
Рис.6. Схема формирования выходного сигнала датчика.
Во время функционирования выходной ток ICC изменяется между значениями 7 мА и 14 мА. Это происходит за счёт применения в датчиках двух источников тока, интегрированных на одной ИС.
Схема подключения датчика показана на рис. 7.

Рис.7. Схема подключения датчика.
Гистерезис переключения необходим для предотвращения нежелательных электрических переключений, вызванных следующими факторами:
1) механическими вибрациями датчика или зубчатого колеса;
2) электрическими помехами (ЭМС);
3) генерацией схемы при очень низких скоростях вращения.
Триггер Шмитта функционально является компаратором, уровни включения и выключения которого различаются на величину гистерезиса переключения.
Таким образом, синусоидальный сигнал датчика преобразуется в сигнал прямоугольной формы (см. рис.8).
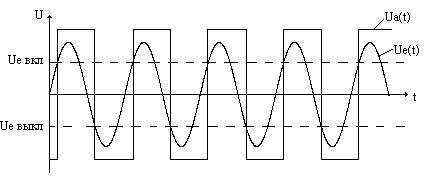
Рис.8. Выходной сигнал датчика.






